
Multi-Objective Path Planning for UAVs with Kinematic Constraints
Path planning is a fundamental problem in robotics, where optimization objectives are often diverse, strongly interdependent, and difficult to unify into a single cost function. In this project, we developed a multi-objective optimization framework combined with a heuristic algorithm that simultaneously optimizes multiple goals and outputs a diverse set of optimal solutions. A key contribution of our approach is a novel path representation based on navigation variables, which allows us to incorporate kinematic constraints and fully exploit the maneuverability of the UAV. Experimental results demonstrate that our algorithm outperforms widely used heuristic methods in finding optimal solutions. Figure bellow illustrates the results of our path planning system in a realistic scenario.
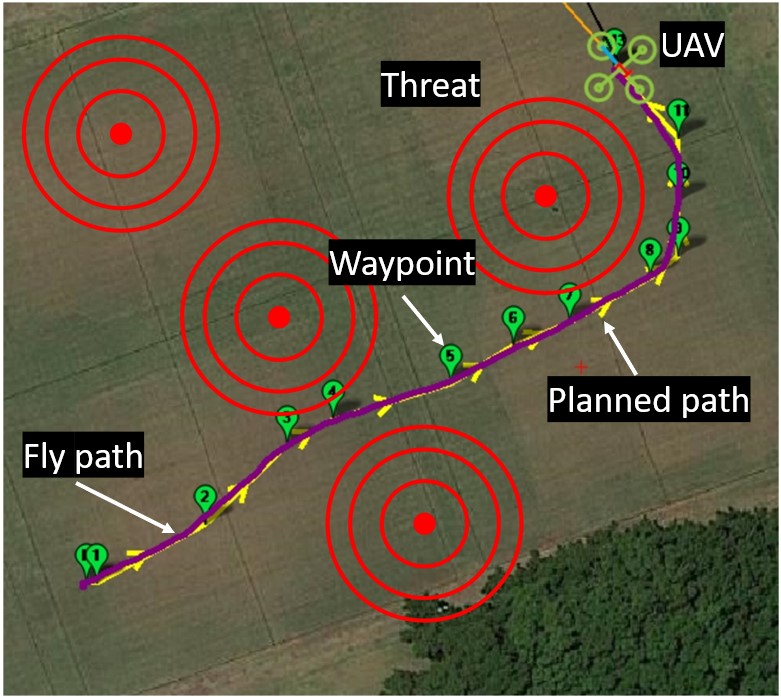
For more details, see our paper.
Project-related source code: https://github.com/ngandng/NMOPSO